Hello! I’m Xinghao (Joshua) Huang, a Ph.D. student in Mechanical Engineering at the University of Southern California (Advisor: Professor Hangbo Zhao). My research focuses on translating shape-adaptive soft electronics into reliable, long-term solutions for organ interfacing and wearable applications. Through the design and fabrication of functional devices, I explore how morphable structures conform to soft, complex surfaces to enable robust sensing and improve human health.
Technical Skill Set: Fabrication and prototyping: lithography, PVD/CVD material deposition, polymer synthesis, 3D printing. Software and hardware:Mechatronics (STM32, Arduino, LabView, Simulink), FEA simulations (Abaqus, COMSOL Multiphysics, Ansys), 3D modelling (SolidWorks, NX, AutoCAD). Programming: C/C++, Python, MATLAB.
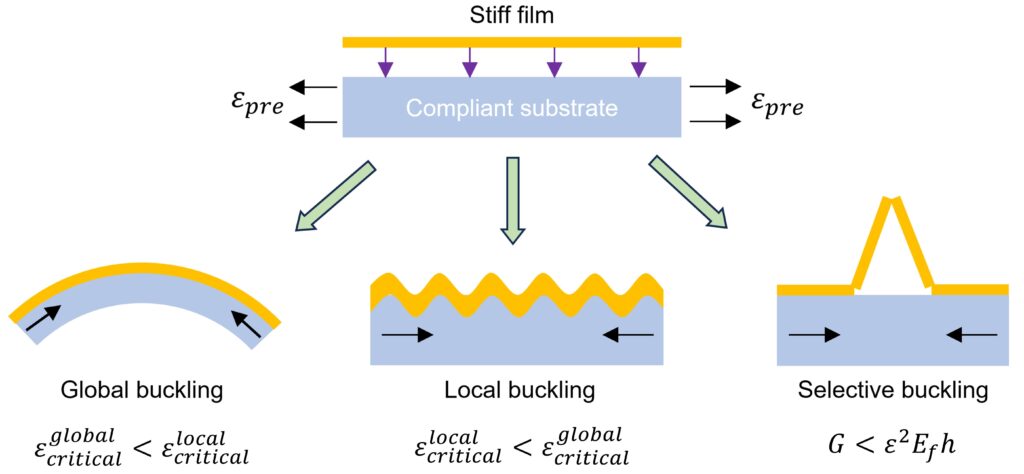
Overview: the core of my research is to develop out-of-plane sensor architectures by harnessing local, global, and selective modes of compressive buckling. This fabrication approach overcomes the limits of planar fabrication, offering high stretchability, programmable shapes, and compatibility with diverse rigid materials. The resulting devices support applications in soft strain sensing, chronic implantation, and neuromodulation. Other research topic I’ve involved include soft robots, liquid metal, and FEA simulations for thin-film devices.
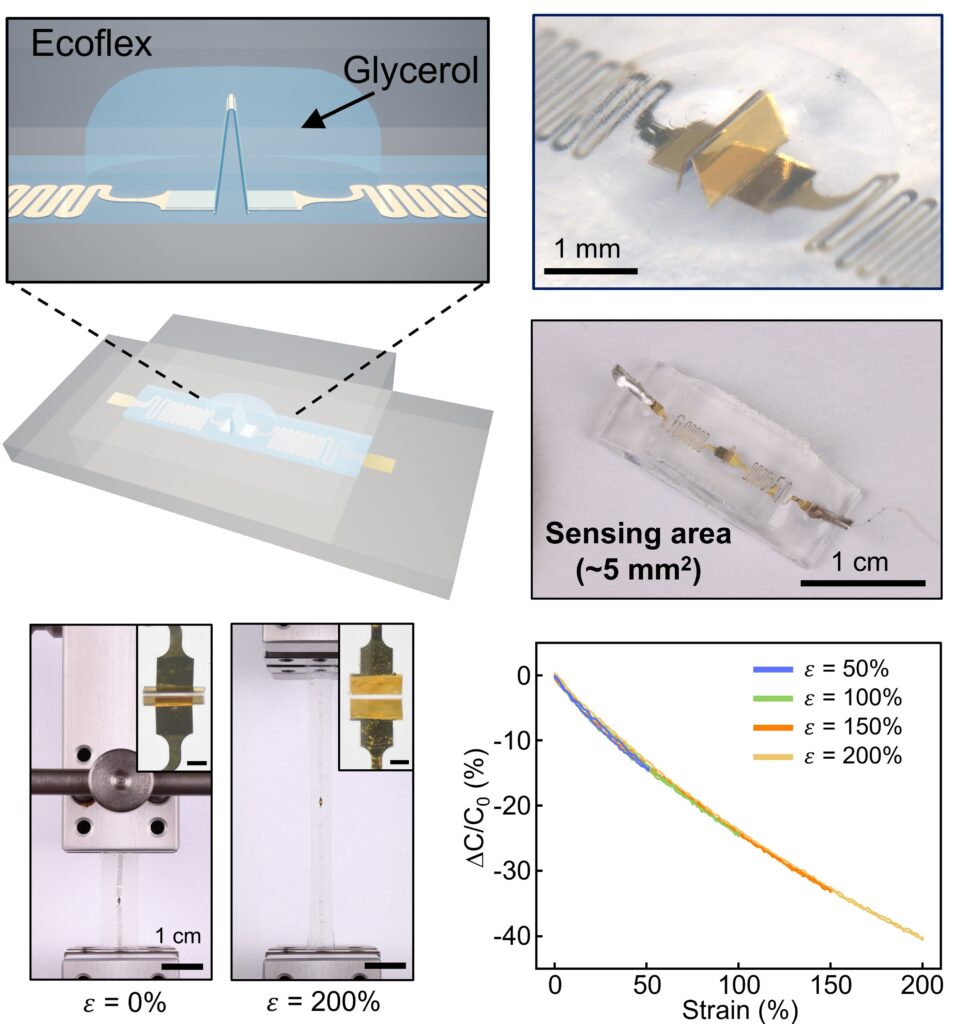
High-stretchability and low-hysteresis strain sensors using origami-inspired 3D mesostructures X. Huang, Y.H. Lin, R. Feng, Y. Shen, Y. Chang, H. Zhao
To achieve strain sensing on soft, deformable bodies with large stretchability, low hysteresis, and local strain mapping, we introduce a capacitive strain sensor concept based on origami-inspired 3D mesostructures formed by compressive buckling. The process geometrically transforms microfabricated 2D electrode patterns into out-of-plane, folded plates with adjustable folding angles, which form non-parallel plate capacitors that can change capacitance according to substrate strain. These capacitive strain sensors exhibit up to 200% stretchability with 1.2% degree of hysteresis, small sensing area (~5 mm^2), and directional strain responses. Rosette arrays of these strain sensors capture multi-directional deformations on a soft continuum arm, which demonstrate their potential in strain mapping and shape reconstructions in soft robotics and biological systems.
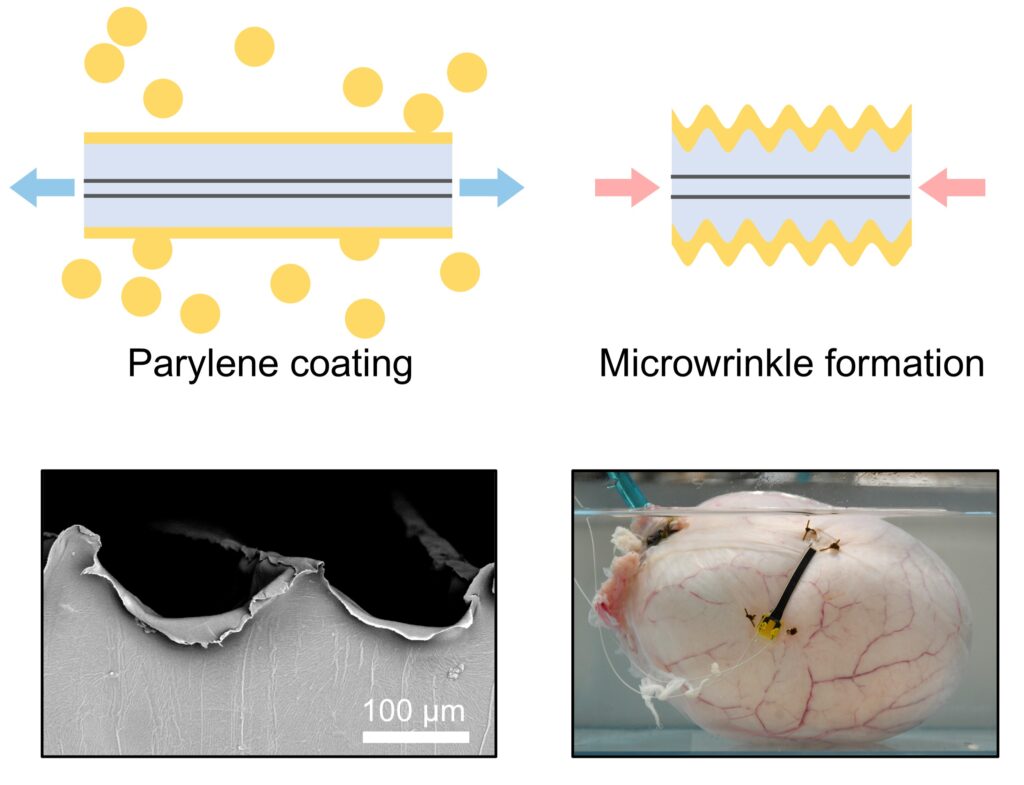
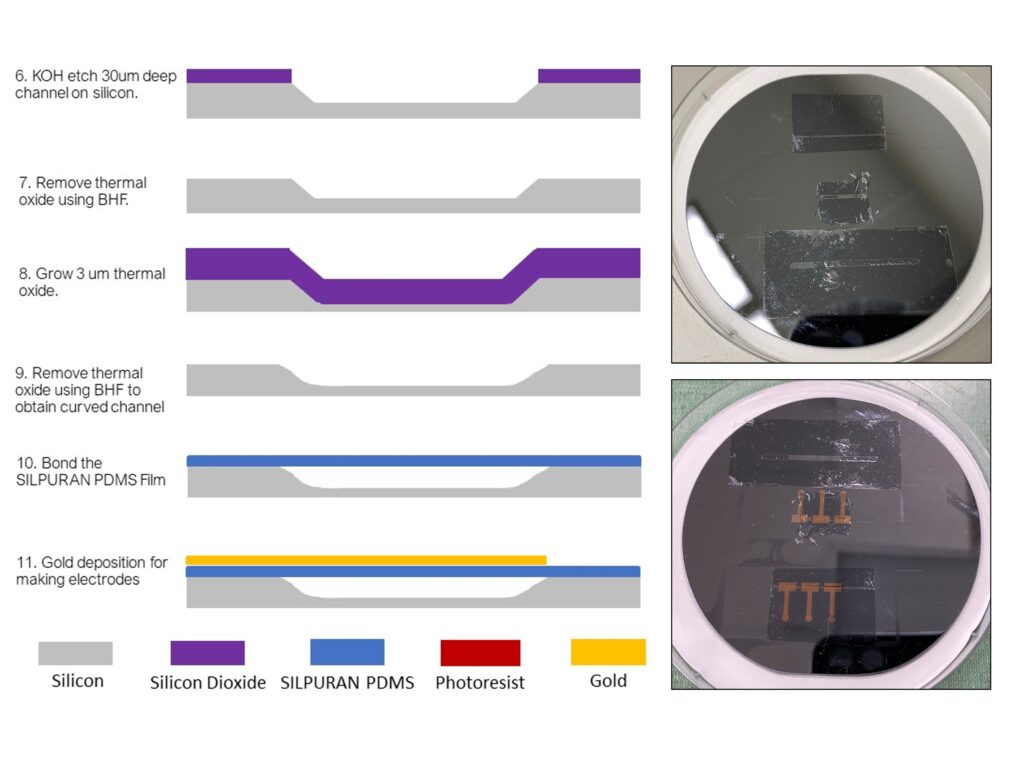
Wrinkled parylene – a stretchable encapsulation for soft implants X. Huang, L. Yang, R. Jacobsen, J. Seo, M. Wu, H. Zhao
A major challenge in implantable soft electronics lies in achieving large strain ranges while ensuring low water permeability inside physiological fluid environments. To overcome this, we present a wrinkled parylene encapsulation strategy that transforms non-stretchable parylene films into highly stretchable coatings through mechanically guided pre-stretching, controlled buckling, and thermal annealing. The resulting encapsulation provides over 60% mechanical stretchability and a normalized water vapor transmission rate of 0.07 g·mm/m²·day, offering one of the best combinations of barrier properties and stretchability among different encapsulation materials.
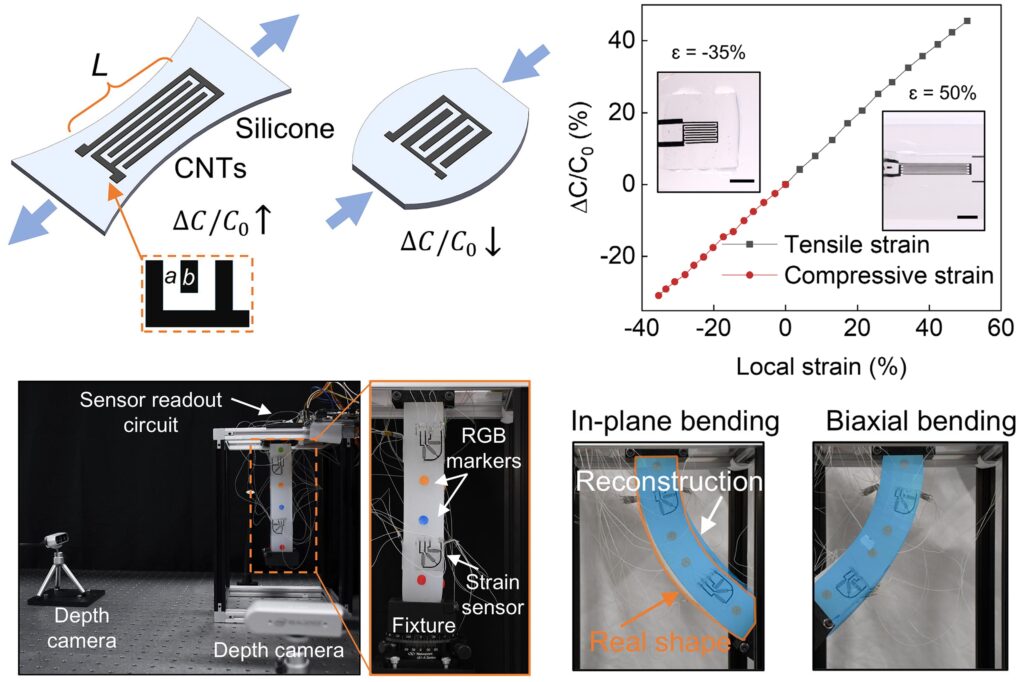
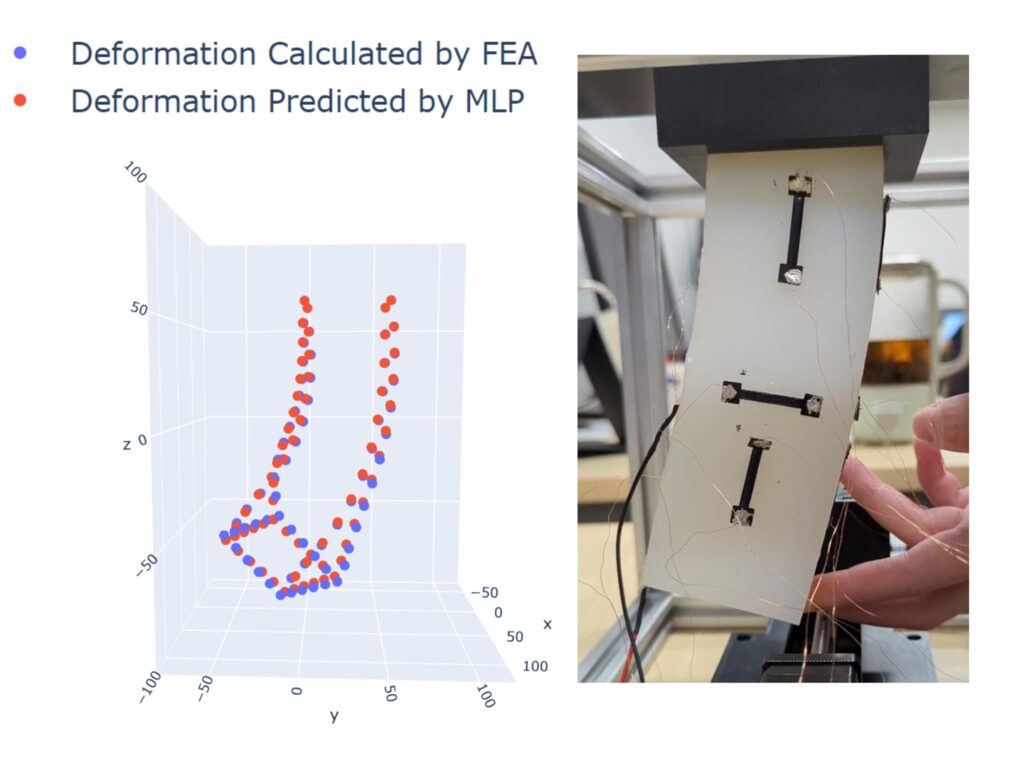
Model-Based 3D Shape Reconstruction of Soft Robots via Distributed Strain Sensing L. Liu, X. Huang, X. Zhang, B. Zhang, H. Xu, V. Trivedi, K. Liu, Z. Shaikh, H. Zhao
To achieve reliable strain mapping on soft robots, a type of interdigitated strain sensors are fabricated using carbon nanotubes or liquid metal. Such strain sensor have excellent linear response and bi-directional sensing capability. The combined effect of high stretchability and low sensing hysteresis enabled accurate soft robot reconstruction. Fabrication methods such as spray coating or screen printing allow mass fabrication of such sensors.
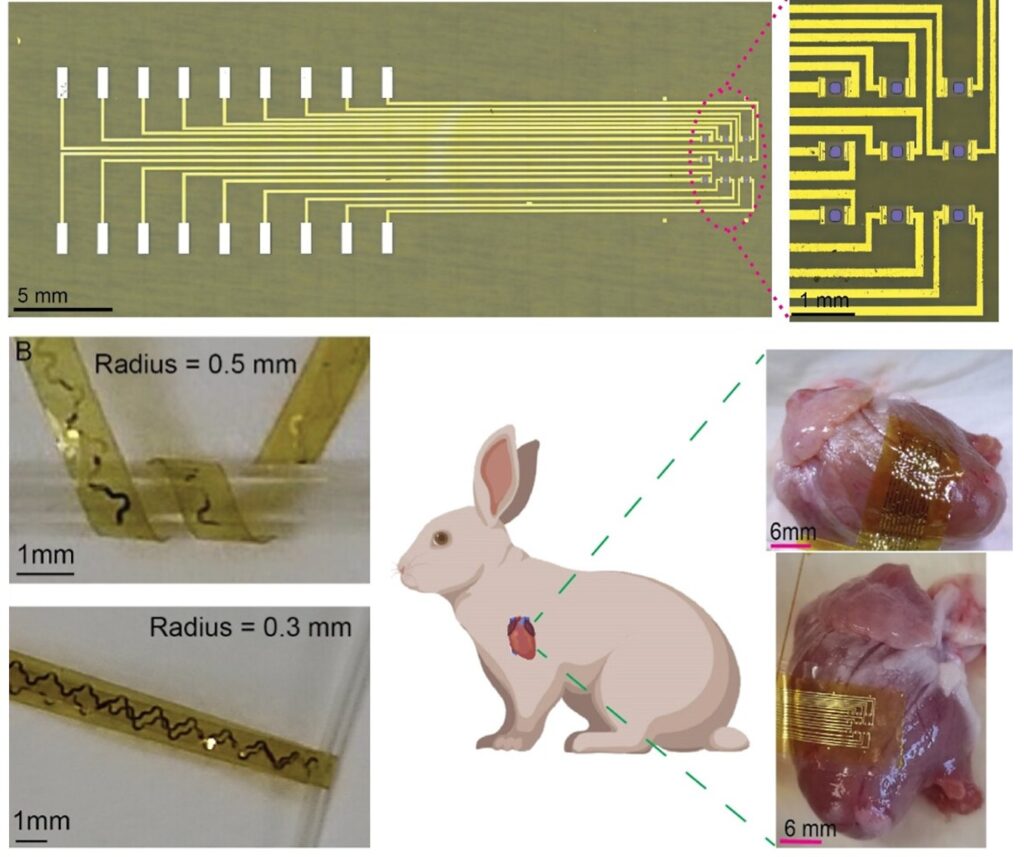
Flexible Electrode Arrays Based on a Wide Bandgap Semiconductors for Chronic Implantable Multiplexed Sensing and Heart Pacemakers T.-A. Truong, X. Huang, M. Barton, A. Ashok, A. Abed, R. Almasri, et al.
This study introduces a multielectrode array featuring silicon carbide (SiC), a wide bandgap (WBG) material, as electrodes, demonstrating its suitability for chronic, multiplexed sensing and stimulating. Our devices exhibit excellent flexibility and longevity, taking advantage of the low bending stiffness and chemical inertness in WBG nanomembranes and multimodalities for physical health monitoring, including temperature, strain, and impedance sensing. As proof of concept for chronic cardiac pacing applications, we demonstrate the effective pacing functionality of our devices on rabbit hearts through a set of ex vivo experiments.